Automatische Ausweisung von Trainingsgebieten
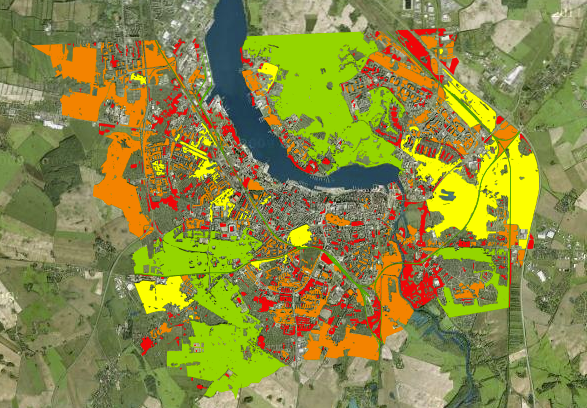
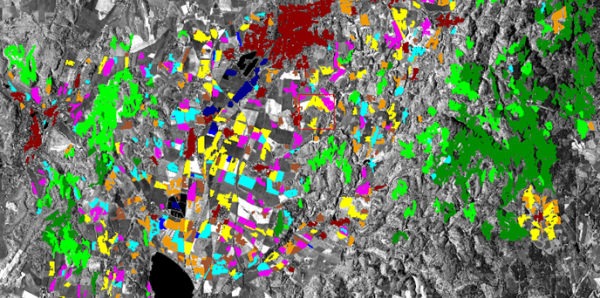
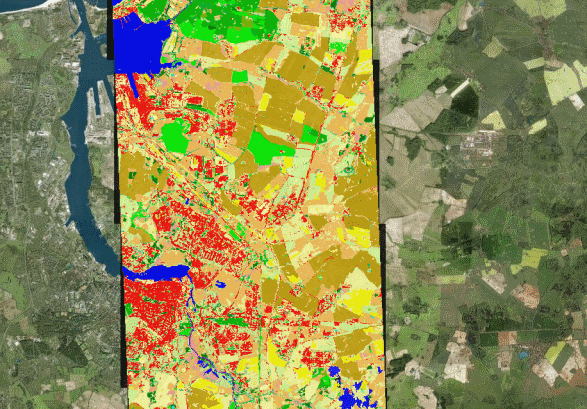
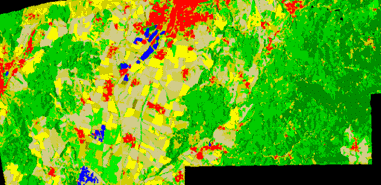
Auf dem Gebiet der Fernerkundung besteht bis heute ein dringender Bedarf an operationellen, d.h. weitestgehend automatisierten, robusten und übertragbaren Auswertesystemen. Mit der Entwicklung einer Prozesskette zur automatischen Trainingsgebietsableitung wurde im Rahmen von Enviland-2 ein Verfahren entwickelt, das zur automatischen Generierung von Landnutzungs-/Bedeckungsinformationen herangezogen werden kann, da die Trainingsgebiete, die als Input für ein überwachtes Klassifikationsverfahren dienen, ohne Nutzerinteraktion erzeugt werden. Eine weitere Einsatzmöglichkeit der Methodik besteht in der Unterstützung des oft sehr zeit- und kostenaufwendigen Prozesses der Generierung von Trainingsdatensätzen. Das entwickelte Verfahren wurde erfolgreich auf zwei landwirtschaftlich geprägte Gebiete in Deutschland angewandt. Die automatisch generierten Trainingsdatensätze beinhalten die Haupt-landbedeckungsklassen (Wasser, Nadelwald, Laub-/Mischwald, Grünland, Ackerland, Siedlungen) sowie verschiedene Feldfruchtarten. Die Prozesskette nutzt die Synergie aus optischen und SAR-Daten, kann aber auch auf alleiniger Basis von SAR-Daten angewandt werden.
In Hinblick auf operationelle Anwendungen ist eine Übertragbarkeit der vorgeschlagenen Prozesskette von herausragender Bedeutung. Das Verfahren wurde für das Testgebiet Nordhausen (Thüringen) entwickelt und mit Klein Altendorf (Nordrhein-Westfalen) erfolgreich auf ein weiteres landwirtschaftliches Areal übertragen. Weiterhin konnte die Prozesskette auf Daten verschiedener Sensoren und Auflösungen (optisch: RapidEye, Spot-4/-5, Landsat TM/ETM; SAR: TerraSAR-X, Envisat ASAR, ERS-2, ALOS PALSAR), auf Satellitenszenen, die zu unterschiedlichen Zeitpunkten (Saison / Jahr) aufgenommen wurden, sowie auf alleiniger Basis von multitemporaler und multisensoraler SAR-Daten angewandt werden.